Mavis VYP Kameralı Kontrol Yazılımı standart kontrollerine yeni bir tane daha eklendi : Parça Yönelimi.
Mavis VYP de, kameralı kontroller 3 gruba ayrılır.
- Standart Kontroller
- Projeye Özgü Kontroller
- Gelişmiş Kontroller
Bir projenin sadece standart kontroller kullanılarak gerçeklenmesi en ideal durumdur. Projeye özgü kontroller bazı durumlarda kaçınılmaz olabilir. VYP, standart kontrol setini zenginleştirerek Projeye özgü kontrolleri olabildiğince minimuma indirgemiştir.

Standart kontrol kullanmanın avantajları
- Kod yazımına gerek kalmaz
- Defalarca test edilmiş olduğundan hatalara açık değildir
- İyi Dökümante edilmiş ve eğitimlerde anlatılmış olduğundan kullanıcılar kolay uyum sağlar
- Modüler / parametrik olduğundan zahmetsizce uyarlanabilir
- Güncelleştirmeler veya arayüz iyileştirmelerinden var olan tüm kurulumlar ek işlem yapılmaksızın yükseltilmiş olur
Parça Yönelimi :
Bu kontrol, sıkça karşılaştığımız “ters yönde takılmış” parçaları yakalamaya yarar. Kullanıcı arayüzü oldukça basittir.
Zorunlu kullanıcı seçimleri
- bağlantı noktası (_juncPoint)
- parçanın doğrultusu (_partDirection) Yatay / Dikey
- parçanın beklenilen yönelimi (_expectingOrientation) Sol / Sağ / Üst / Alt
Opsiyonel kullanıcı seçimleri
- Yaklaşma dörtgeninin kenar uzunluğu (_juncHeight) Varsayılan Değer : 10
Böylece sadece 3 seçimle birlikte kullanıcı parçanın olması gereken yönü sisteme kolayca bildirmiş olur.

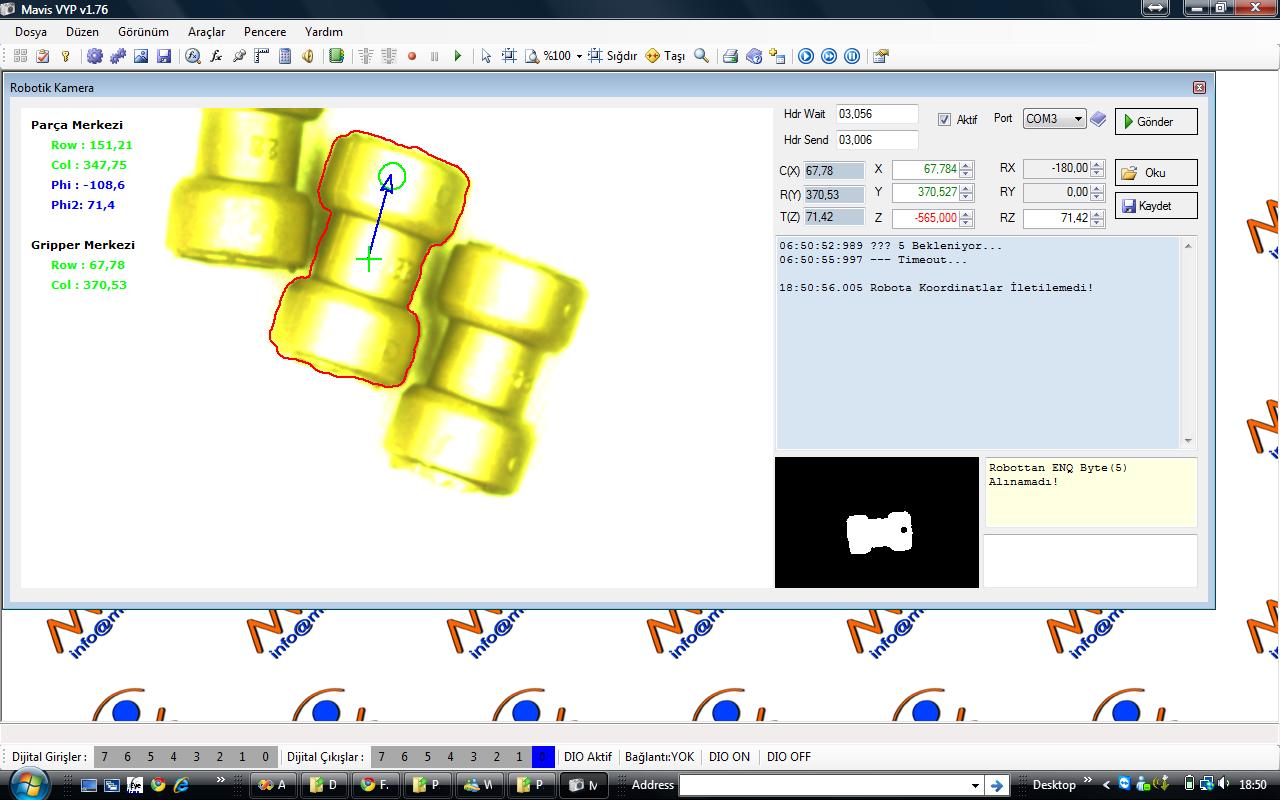
(VYP Parça Yönelimi İçeren Kontrolleri Çalıştırıyor)

VYP Ekranında %800 zoom edildiğinde, parçanın yönelimi görülüyor.
Yönelim kullanıcının beklediği doğrultuda ise yeşil ok, aksi halde kırmızı ok (ters istikamete) ekranda belirecektir.
Yeni kontrolün C# kodlaması :
private bool CheckDirection(JobDefs job)
{
if (masterFailed)
{
DrawCurrentRoi(job, false);
return false;
}
HObject ho_ImageReduced;
HObject ho_Region, ho_SelectedRegions, ho_Open, ho_Rect;
HTuple hv_R1, hv_C1, hv_R2, hv_C2;
bool retval = false;
// Initialize local and output iconic variables
HOperatorSet.GenEmptyObj(out ho_ImageReduced);
HOperatorSet.GenEmptyObj(out ho_Region);
HOperatorSet.GenEmptyObj(out ho_SelectedRegions);
HOperatorSet.GenEmptyObj(out ho_Open);
HOperatorSet.GenEmptyObj(out ho_Rect);
ho_ImageReduced.Dispose();
if (imagesource.ReduceJobDomain(job, out ho_ImageReduced))
{
ho_Region.Dispose();
imagesource.ApplyThreshold(job, ho_ImageReduced, out ho_Region);
if (job.ValDouble("area") > 0)
{
ho_SelectedRegions.Dispose();
imagesource.ApplySelection(job, ho_Region, out ho_SelectedRegions);
int openR = job.VarInt32("OpeningRadius", 1);
ho_Open.Dispose();
HOperatorSet.OpeningCircle(ho_SelectedRegions, out ho_Open, openR);
imagesource.DisplayObj(ho_Open, "blue");
// Yaklaşma Bölgesini oluşturalım
HOperatorSet.SmallestRectangle1(ho_Open, out hv_R1, out hv_C1, out hv_R2, out hv_C2);
int tutamac = job.VarInt32("_juncPoint", 3); //L R U D
int rHeight = job.VarInt32("_juncHeight", 10); // Yaklaşma Dörtgeninin Yüksekliği
int yonelim = job.VarInt32("_partDirection", 0); // Horizontal, Vertical
int beklenenYon = job.VarInt32("_expectingOrientation", 0); // L R U D
if (tutamac == 0) // Soldan tutturulmuş
HOperatorSet.GenRectangle1(out ho_Rect, hv_R1, hv_C1-rHeight, hv_R2, hv_C1);
else if (tutamac == 1) // Sağdan tutturulmuş
HOperatorSet.GenRectangle1(out ho_Rect, hv_R1, hv_C2, hv_R2, hv_C2 + rHeight);
else if (tutamac == 2) // Üstten tutturulmuş
HOperatorSet.GenRectangle1(out ho_Rect, hv_R1 - rHeight, hv_C1, hv_R1, hv_C2);
else if (tutamac == 3) // Alttan tutturulmuş
HOperatorSet.GenRectangle1(out ho_Rect, hv_R2, hv_C1, hv_R2 + rHeight, hv_C2);
imagesource.SetColor("yellow");
ho_ImageReduced.Dispose();
HOperatorSet.ReduceDomain(imagesource.Image, ho_Rect, out ho_ImageReduced);
ho_Region.Dispose();
if (imagesource.ApplyThreshold(job, ho_ImageReduced, out ho_Region))
{
double yRow = job.ValDouble("row"); // yaklaşma Row
double yCol = job.ValDouble("column"); // yaklaşma col
HOperatorSet.DispCross(imagesource.DisplayHandle, yRow, yCol, 12, 0);
if (yonelim == 0) // Yatay bir parça ise
{
double pC1 = TupleToDbl(hv_C1);
double pC2 = TupleToDbl(hv_C2);
double lFark = Math.Abs(pC1 - yCol); // merkez ile sol noktanın farkı
double rFark = Math.Abs(pC2 - yCol); // merkez ile sağ noktanın farkı
//imagesource.SetColor("blue");
if (beklenenYon == 0) // Soldan bekleniyor
{
retval = lFark > rFark; // Solda bekleniyordu, geldi.
imagesource.SetColor(retval ? "green" : "red");
if (retval)
HOperatorSet.DispArrow(imagesource.DisplayHandle, yRow, yCol, yRow, hv_C1, 1);
else
HOperatorSet.DispArrow(imagesource.DisplayHandle, yRow, yCol, yRow, hv_C2, 1);
}
else if (beklenenYon == 1) // Sağdan bekleniyor
{
retval = rFark > lFark;
imagesource.SetColor(retval ? "green" : "red");
if (retval)
HOperatorSet.DispArrow(imagesource.DisplayHandle, yRow, yCol, yRow, hv_C2, 1);
else
HOperatorSet.DispArrow(imagesource.DisplayHandle, yRow, yCol, yRow, hv_C1, 1);
}
}
else // Dikey Parça
{
double pR1 = TupleToDbl(hv_R1);
double pR2 = TupleToDbl(hv_R2);
double uFark = Math.Abs(pR1 - yRow); // merkez ile üst noktanın farkı
double dFark = Math.Abs(pR2 - yRow); // merkez ile alt noktanın farkı
if (beklenenYon == 2) // Üstte bekleniyor
{
retval = uFark > dFark;
imagesource.SetColor(retval ? "green" : "red");
if (retval)
HOperatorSet.DispArrow(imagesource.DisplayHandle, yRow, yCol, hv_R1, yCol, 1);
else
HOperatorSet.DispArrow(imagesource.DisplayHandle, yRow, yCol, hv_R2, yCol, 1);
}
else if (beklenenYon == 3) // Altta bekleniyor
{
retval = dFark > uFark;
imagesource.SetColor(retval ? "green" : "red");
if (retval)
HOperatorSet.DispArrow(imagesource.DisplayHandle, yRow, yCol, hv_R2, yCol, 1);
else
HOperatorSet.DispArrow(imagesource.DisplayHandle, yRow, yCol, hv_R1, yCol, 1);
}
}
PutLog(job, retval, "Parça Beklenen Yönde " + (retval ? "Geldi" : "Gelmedi"));
}
}
else RedLog(job, "Seçili Bölg Bulunmamadı!");
}
else RedLog(job, "ROI indirgenemedi!");
ho_ImageReduced.Dispose();
ho_Region.Dispose();
ho_SelectedRegions.Dispose();
int compela = job.VarInt32("Complement", 0);
if (compela == 1) retval = !retval;
if (!retval)
{
DrawCurrentRoi(job, retval);
int masterJob = job.VarInt32("MasterJob", 0);
if (masterJob == 1)
masterFailed = true;
}
return retval;
}



 Öğretilecek parçanın en ideal parça olmasına özen gösterilir. Buna rağmen ekranda parça sınır çizgileri belirlenir ve kenar iyileştirme algoritmaları ile çapak ve pürüzler ön işlemden geçirilerek temizlenir.
Öğretilecek parçanın en ideal parça olmasına özen gösterilir. Buna rağmen ekranda parça sınır çizgileri belirlenir ve kenar iyileştirme algoritmaları ile çapak ve pürüzler ön işlemden geçirilerek temizlenir.